日本語 | English
Video
Simulation and Haptics
| Haptic Proxy with Continuous Collision Detection | Two finger haptic manipulation (World Haptics'17) | Haptic Music Player | Haptic Ring |
 |  |  |  |
| Springhead Beetle | Multi-Rate Multi-Range Dynamic Simulation for Haptic Interaction | Perception based High Definition Haptic Rendering | |
 |  | 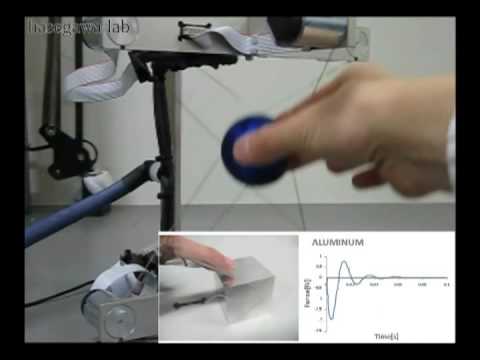 |
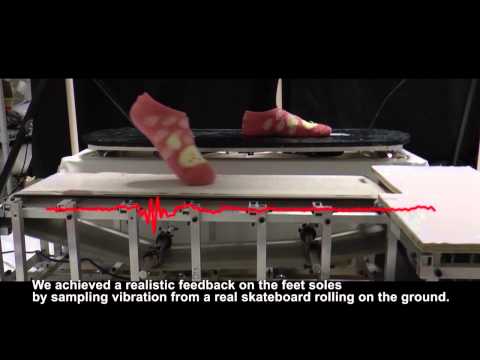
| VibroSkate1 | VibroSkate2 | Interactive Cooking Simulator(SIGGRAPH'09) |
 |  |  |
| Virtual Canoe | Virtual Rubik's Cube | Virtal Basketball |
 |  |  |
Interface, Robots and Embodiment
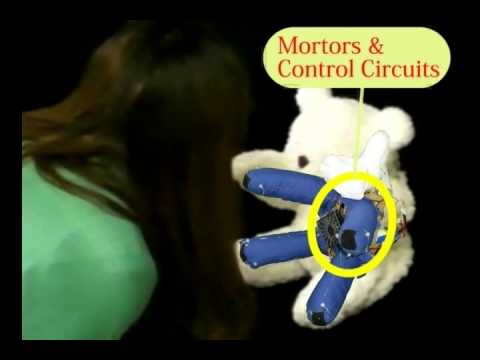
| NUIBOT | Stuffed toy robot and Kinect | Force Control based Soft stuffed Robot Interaction | Stuffed Toys Alive! -Cuddly Robots from Fantasy World- (SIGGRAPH'12) |
 |  |  |  |
| Expression of After Image Perception by Blink and Assimilation the Image | SprBlender | Sonification of the center of gravity (body position) for skiing in a gentle slope 1 | Sonification of the center of gravity (body position) for skiing in a gentle slope 2 |
 |  |  |  |
| Virtual stroboscope for robot motion design | Quiet Reducer with output shaft | Quiet Reducer without output shaft |
 |  |  |
Character Expressions
| AI characters that can touch each other (インタラクション'20) | Performance Support! VTuber avatar that moves on its own when he/she get a gift(CEDEC'19) | VTuber avatars colliding with objects |
 |  |  |
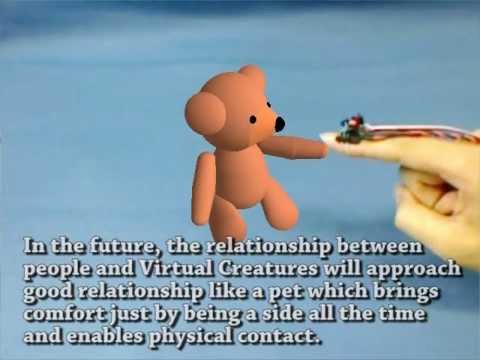
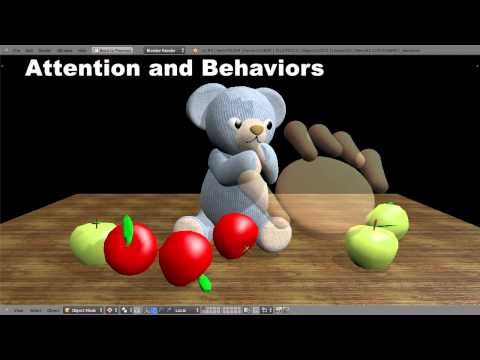
| TEllipsoid: Ellipsoidal Display for Videoconference System Transmitting Accurate Gaze Direction 1 | TEllipsoid: Ellipsoidal Display for Videoconference System Transmitting Accurate Gaze Direction 2 | Virtual Creature with Selective Attention Model1 |
 |  |  |
| Virtual Creature with Selective Attention Model2 | Virtual Creature with Leap Motion | A Child Play with Virtual Creature |
 |  |  |
| Agent with natural joint attention | Interactive Creature Demo with SprBlender | Kobito1 | Kobito2 |
 |  |  |  |
| Pliant Motion: Integration of Virtual Trajectory Control into LCP Based Physics Engines | A development environment for designing interactive characters with sensorimotor models | Physics driven Keyframing for Artist-directable Interactive Character | |
 |  |  |
Laboratory's Introduction Videos in the past
 |  |  |